SAINT
Kontakt: Jonis Kiesbye
Projektziel
SAINT beschäftigt sich mit dem robotischen Greifen in unbekannten Umgebungen. Sowohl industrielle wie auch extraterrestrische Anwendungen erfordern dabei eine Zuverlässigkeit, die mit dem heutigen Stand der Technik noch nicht erreicht wird.
Das Greifen von zufällig angeordneten Gegenständen mit Robotern funktioniert bisher nur in vollständig bekannten Umgebungen. Menschen erledigen solche Aufgaben um Größenordnungen schneller und mit höherer Zuverlässigkeit. Deshalb arbeiten der Lehrstuhl für Angewandte Mechanik (AM) und die Franka Emika GmbH an verbesserten Bahnplanungs- und Objekterkennungsalgorithmen für das robotische Greifen.
Der LRT erweitert die Greif- und Transportalgorithmen um ein Fehlerbehandlungs- und Teleoperationsmodul, welche dem Robotersystem ermöglichen, Fehlerfälle autonom oder mit Hilfe eines menschlichen Operators zu lösen.
Die FIEGE Logistik Stiftung mit Sitz in Greven, ist als Logistikanbieter stets an innovativen Logistiklösungen interessiert. In diesem Projekt stellt das Unternehmen FIEGE den Anwendungsfall an einem Standort zur Verfügung.
Industrielle Anwendung
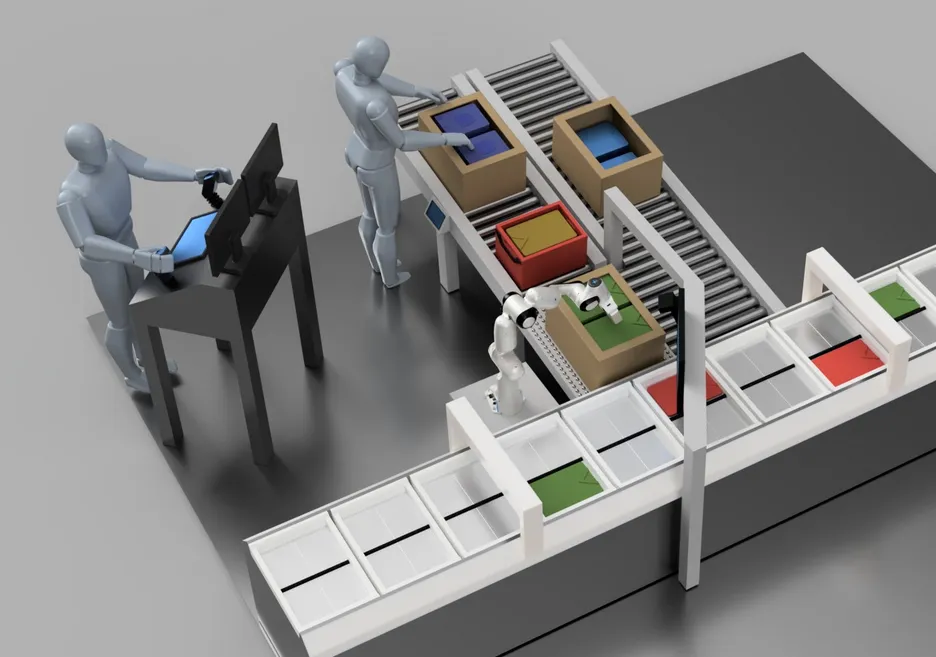
FIEGE ist einer der größten Logistikdienstleister in Europa und bietet für seine Kunden individuelle Logistiklösungen. Am Standort in Mönchengladbach übernimmt FIEGE die Logistikabfertigung für einen Modekunden. Neben Kleidungsstücken werden auch weitere Artikel vollautomatisch gelagert und sortiert. Einzelne Prozesse wie das Umpacken von Kleidungsstücken zwischen Kartons, Dropboxen und dem oben abgebildeten Split-Tray Sorter werden aktuell vollständig manuell per Menschenhand durchgeführt. Dieses Projekt zielt darauf, diese bestehenden manuellen Prozesse durch den Einsatz von robotischen Greifarmen zu unterstützen. Das Forschungsfeld des SAINT-Projekts konzentriert sich dabei auf das Umpacken von Kleidung aus Kartons auf den Split-Tray Sorter. Gemeinsames Ziel ist hier eine produktive Anwendung der Robotik mit verhältnismäßig wenigen Anpassungen an der bestehende Anlage.
Shared Autonomy
Um die kostbare Zeit des Menschen in Fehlerfällen effizient zu nutzen, soll dieser nicht allein, sondern in Zusammenarbeit mit den autonomen Greifalgorithmen eine Lösungsstrategie finden. So kann sich der Mensch auf das konkrete Problem konzentrieren, das zum Fehler führte, und muss weniger Zeit aufwenden als wenn er den gesamten Greifzyklus in Echtzeit steuern würde.
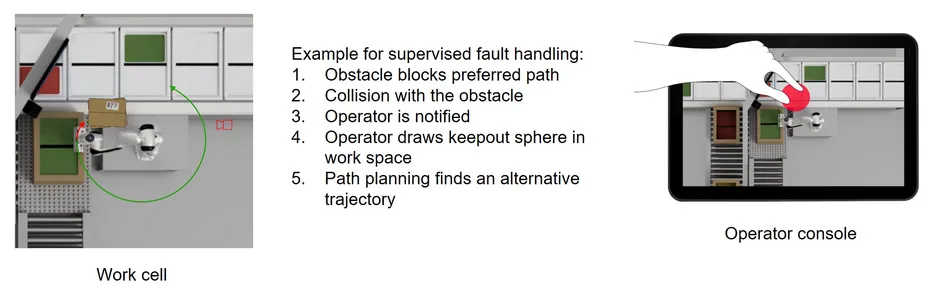
Abhängig davon, ob der Fehler bei der Objekterkennung, dem Zugreifen, dem Transport oder dem Ablegen des Objekts passiert, wird dem Operator eine auf den Fehlerfall zugeschnittene semi-autonome App angezeigt, in der er den zum Lösen des Fehlers essentiellen Input geben kann. Die untenstehende Abbildung zeigt einen exemplarischen Anwendungsfall: Wird ein Hindernis im Arbeitsraum des Roboters nicht autonom erkannt, kann der Operator eine sogenannte Keepout-Sphere in den Arbeitsraum zeichnen und so die Bahnplanung zum Umfahren des Hindernisses zwingen.
Fehlerbehandlung
In der Raumfahrt sind autonome Fehlerbehandlungsalgorithmen (englisch Fault Detection, Isolation, and Recovery, kurz FDIR) weit verbreitet, die beispielsweise sicherstellen, dass Satelliten nach dem Ausfall einer Komponente weiterbetrieben werden können und nicht den Kontakt zur Erde verlieren. Im Falle des SAINT-Projekts werden ähnliche Algorithmen verwendet, um Fehler während des Greifprozesses zu erkennen, die möglichen Folgen abzuschätzen und zwischen einer voll- oder semi-autonomen Lösungsstrategie abzuwägen.
Studienarbeiten
Das SAINT Projekt bietet einen spannenden Rahmen für Arbeiten in Richtung Teleoperation, Nutzerinteraktion, Fehlerbehandlung ROS-Programmierung, etc. Schauen Sie bei Interesse zuerst in die BaSaMa-Datenbank der Fachschaft und fragen Sie bei der obenstehenden Kontaktperson direkt nach, welche Themen noch nicht ausgeschrieben sind.
Projektpartner
Lehrstuhl für Angewandte Mechanik (AM) - Bahnplanung
Franka Emika GmbH - Greifer und Objekterkennung
Lehrstuhl für Raumfahrttechnik (LRT) - Fehlerbehandlung und Teleoperation
FIEGE Logistik Stiftung & Co. KG - Industrielle Anwendung
Das SAINT-Projekt wird finanziert von der Bayerischen Forschungsstiftung (BFS).