Robuste und Sichere Teleoperation
Kontakt: Nicolas Zunhammer, Maximilian Prexl
Zusätzlich zu einer funktionierenden Kommunikationsarchitektur ist es unabdingbar im Projekt CopKa, dass der Disponent das UAV während des Einsatzes problemlos steuern kann. Dazu muss der Disponent intuitiv und ohne langes Training, das Fluggerät bedienen und Informationen schnell verarbeiten können. Dabei ist es notwendig, das Zusammenspiel zwischen den Fähigkeiten des UAV, der Latenz des Kommunikationslinks und dem HMI in der Leitstelle zu untersuchen. Dazu wurden neue Bedienperipherien wie ein kommerziell erhältliches VR-System (HTC Vive), sowie der Einsatz von zwei Monitoren mit einer Space Mouse für eine einfachere Bedienung in mehreren Studien untersucht.

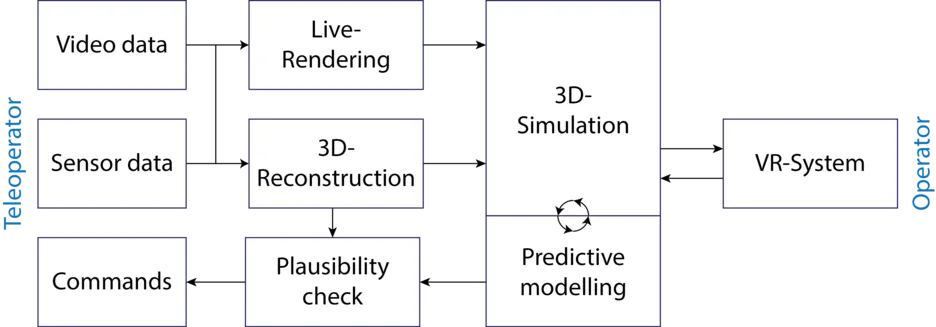
Zusätzlich zu den neuen Peripherien werden auch neue Methoden verwendet, um die Teleoperation zu erleichtern. Dazu gehört unter anderem eine Echtzeit 3D-Rekonstruktion, um das Situationsbewusstsein des Disponenten zu erhöhen. Die resultierende 3D-Rekonstruktion kann danach verwendet werden, um die Trajektorie des UAV vor zu berechnen, um frühzeitige Kollisionen durch den Operator zu verhindern. Dabei steht im Fokus der Arbeit die Erforschung von geeigneten Rekonstruktionsalgortihmen in Echtzeit und die Entwicklung eines robusten und effizienten Predictive Conflict Handling, um Kollisionen oder nicht erlaubte Bewegungen abzufangen.