Die DFG-Forschergruppe "Rechnergestützte kooperative Trassenplanung in mehrskaligen 3D-Stadt- und Bauwerksmodellen" hat zum Ziel Methoden und Techniken zur kooperativen Planung von Infrastrukturbauwerken zu erforschen und zu entwickeln. An dem Projekt sind fünf Gruppen an der Technischen Universität München sowie dem Karlsruher Institut für Technologie beteiligt.
Am Lehrstuhl für Geoinformatik ist das Teilprojekt "Advanced-Geo-Web-Services für Anforderungen aus der mehrskaligen 3D-Trassenplanung" angesiedelt.
Projektbeschreibung
Die Planung von Straßen, Bahn und U-Bahnlinien sowie den dazugehörigen Struktureinrichtungen wie Tunneln, Unter- und Überführungen, Haltestellen, elektrischen Leitungen, Kanälen und Belüftungen in städtischen Umgebungen ist hochgradig komplex. Eine Vielzahl von rechtlichen, ökonomischen, ökologischen sowie konstruktiven Rahmenbedingungen ist zu beachten und erfordert die Zusammenarbeit einer großen Zahl an Planern diverser Fachrichtungen sowie den Einbezug von fachfremden Entscheidungsträgern aus unterschiedlichen Ressorts bis hin zu Laien im Rahmen von Bürgerbeteiligungen. Die konsequente Nutzung von 3D Modellen der vorhandenen Hochbauten, unterirdischen Bauwerke und Infrastruktur sowie der Einsatz geeigneter Werkzeuge für die kooperative Arbeit mit Modellen der geplanten Bauwerke kann die Komplexität der Planungsaufgabe im Vergleich zu den heute üblichen Planungsprozessen, die mit sehr heterogenen Datengrundlagen (u.a. 2D + 3D) und nebenläufig arbeitet, stark verringern.
Die von der Deutschen Forschungsgemeinschaft geförderte Forschergruppe „Rechnergestützte kooperative Trassenplanung in mehrskaligen 3D-Stadt- und Bauwerksmodellen“ (kurz: 3D-Tracks) befasst sich mit eben diesem Thema. Die fünf Kooperationspartner der interdisziplinären Forschergruppe vom Karlsruher Institut für Technologie (KIT) und der Technischen Universität München (TUM) bringen ihr jeweiliges Fachwissen ein.
So arbeitet die Gruppe um Prof. Breunig (KIT) an einer raum-zeitlichen Datenbank um die dreidimensionalen Daten der Stadt- und Bauwerksmodelle konsistent vorhalten und abfragen zu können. Diese Datenbank soll auch als Back-end der Kooperationsplattform dienen, welche von der Gruppe um Prof. Rank (TUM) entwickelt wird. Ziel dieser Plattform ist es, die synchrone Arbeit mehrerer Benutzer auf demselben Planungsobjekt zu ermöglichen und insbesondere durch das zentralisierte Datenmanagement die Konsistenz bei der parallelen Bearbeitung zu sichern.
Da nicht jeder an der Planung beteiligte Experte und nicht in jeder Planungsphase alle Daten im maximalen Detailgrad benötigt, bzw. hoch detailierte Daten sogar hinderlich sein können, arbeitet die Gruppe um Prof. Borrmann (TUM) an der methodischen Umsetzung von mehrskaliger (im Sinne von Detaillierungsstufen) Modellierung. Auch hier ist die automatisierte Konsistenzsicherung zwischen den Detaillierungsstufen ein zentrales Forschungsthema.
Um die Überprüfung des Baufortschrittes mit dem Planungsstand zu erleichtern arbeitet die Gruppe um Prof. Hinz (KIT) an einem mobilen bildgestützten System das in einem Augmented Reality Browser einen visuellen Soll-Ist Vergleich ermöglichen soll.
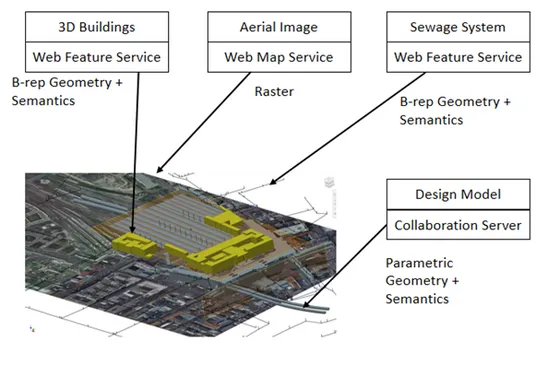
Bei einem so umfangreichen Bauvorhaben wie der Planung einer unterirdischen, innerstädtischen Trasse, müssen diverse Randbedingungen, insbesondere bestehende Bauten, beachtet werden. Am Lehrstuhl Geoinformatik (TUM) wird daher an neuartigen Geo-Web-Services geforscht, die es ermöglichen, externe, dreidimensionale Daten ad hoc in den kollaborativen und interdisziplinären Planungsvorgang einzubinden. Um durch web-basierte GIS-Analysen die kollaborative Zusammenarbeit zu erleichtern wird zudem die transparente Beschreibung von GIS-Analyse Workflows sowie die formale Beschreibung von Qualitätsanforderungen an Geodaten über die Schema-Konsistenz hinaus, erforscht.
Projektträger
Deutsche Forschungsgemeinschaft (DFG)
Projektpartner
Karlsruher Institut für Technologie (KIT)
Technische Universität München (TUM)
Praxispartner