Flying spider
Aerial tensile perching of tethered robots for in-canopy monitoring

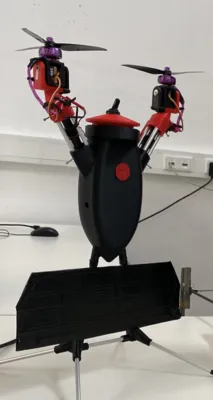
Aerial Tensile Perching and Disentangling Mechanism for Long-Term Environmental Monitoring
Aerial robots show significant potential for forest canopy research and environmental monitoring by providing data collection capabilities at high spatial and temporal resolutions. However, limited flight endurance hinders their application. Inspired by natural perching behaviors, we propose a multimodal aerial robot system that integrates tensile perching for energy conservation and a suspended actuated pod for data collection. The system consists of a quadrotor drone, a slewing ring mechanism allowing 360° tether rotation, and a streamlined pod with two ducted propellers connected via a tether. The integrated system expands the operational capabilities and enhances the energy efficiency of aerial robots for long-term monitoring tasks.
Published article: https://ieeexplore.ieee.org/document/10609975 presented in International Conference on Robotics and Automation (ICRA) 2024
PhD candidate Romanello L. is responsible of this project, please reach out to him if you want to know more: luca.romanello@tum.de.
Simbi: Aerial-deployed soft underwater gripper
Gotta catch ’em all, safely! Aerial-deployed soft underwater gripper
Underwater soft grippers show significant potential for underwater monitoring, research and object retrieval tasks. These systems are usually integrated on unmanned underwater vehicles or deployed and remotely actuated from a water surface vehicle. These methods result in disruptions to water ecosystems, affecting features like reefs, algae, and various species, including crabs and turtles due to their large and cumbersome size. In this project, we propose a new solution for shallow water underwater grasping tasks. Our approach involves a lightweight underwater soft gripper affixed to a custom submarine pod that can be deployed from a drone. The utilization of a drone for deployment, combined with a small locomotion-capable gripper-pod system, significantly mitigates water disturbance, and allows for swift and efficient travel to the mission target area.
Published article: https://ieeexplore.ieee.org/document/10522045 Presented in IEEE International Conference on Soft Robotics (Robosoft) 2024
PhD candidate Romanello L. is responsible of this project, please reach out to him if you want to know more: luca.romanello@tum.de.

TreeSpider

A tether-based drone with integrated perching arms and anchoring capability enables in-canopy stabilization and manipulation. Once tethered to a branch, the system, featuring a 360° ring, maneuvers freely in any direction within the canopy. The ring decouples the tether from the drone frame, allowing independent pitch reorientation along the longitudinal axis, while dynamic tether length adjustment optimizes movement and conserves energy. This design enables multi-tree sensing by extending reach to adjacent trees while tethered and facilitates secondary perching for physical interaction. Experiments showed a fivefold reduction in energy consumption compared to untethered hovering. The system includes a leaf sampling tool and a tether winding mechanism.
PhD candidate Romanello L. is responsible of this project, please reach out to him if you want to know more: luca.romanello@tum.de.
Submitted to IEEE RA-L.
SailMAV
Sailing flying vehicle for water environmental sensing

SailMAV is a project that originated from the Aerial Robotics Lab at Imperial College London in 2018. The project involves a flying sailing platform designed to perform a complete water environmental mission, from flying to landing on water, sailing, and finally taking off from water. The platform is custom-made, from the hulls to the wings and tail, as well as the electronics.
In recent years, the team has successfully tested the platform twice in Lake Vrana, Croatia, to map the biodiversity of the lake and recognize bird species, track human exploitation and provide information in two different seasons of the year. Luca played a crucial role in designing a controller to adapt to various weather conditions and environmental mission purposes.
The team is currently exploring further studies, including the creation of a VTOL version that facilitates takeoff from water, which has proven to be the most challenging aspect of the project.
TumblePods
Tumbling Robotic sensors for Minimally-invasive Benthic Monitoring
Novel framework featuring a lightweight tumbler system with an integrated sensing unit, deployed via a drone to minimize habitat disruption. Designed for slow descent (0.8–2.5 m/s), the tumbler lands gently on the water surface before releasing the sensing pod, which collects non-invasive benthic zone data. Equipped with temperature and pressure sensors, the pod includes a buoyancy system activated by a chemical reaction, inflating a silicon membrane by 30% (exceeding the 5.7% required for positive buoyancy) at 70 kPa. Made from eco-friendly materials, the tumblers reduce environmental impact if lost during missions and have been tested for optimized gliding and descent performance.
Accepted in IEEE Robosoft 2025!!! Preprint paper: arxiv.org/abs/2410.23049
PhD candidate Romanello L. is responsible of this project, please reach out to him if you want to know more: luca.romanello@tum.de.

AquaMAV
VTOL fixed-wing UAAV (unmanned aerial-aquatic vehicle)
AquaMAV is an ambitious project that originated from the Aerial Robotics Lab at Imperial College London in 2013. The project involves developing a drone that can perform fixed-wing flight and underwater navigation. The current platform under development is a tail sitter tilting rotors drone with hovering capabilities, making the robot's missions safer and more autonomous.
Accepted paper in IEEE Ubiquitous Robots 2024. Paper link: arxiv.org/abs/2410.23722
Flapping hydrofoils
Camber-changing flapping hydrofoils for efficient water surface propulsion
Flapping hydrofoils is a project developed within the TUM eAviation group. The primary goal of the project is to create an efficient water propulsion system that can be coupled with a water surface platform, such as SailMAV. The platform will take advantage of the lift generated to produce forward propulsion, enabling water surface motion. Additionally, the platform has the potential to harvest wave energy and facilitate seaplane takeoff from water.
Accepted paper in IEEE Ubiquitous Robots 2024. Paper link: https://arxiv.org/abs/2410.23032

Bioinspired perching mechanism for flapping-wing MAVs
The soft and bioinspired perching mechanism for bird sized flapping-wing MAVs originated at the eAviation Laboratory at TUM. The goal of the project is to enable perching in flapping-wing drones to further their mission capabilities. The developed concept combines a fish-jaw inspired four-bar linkage with an active-passive actuation method to achieve a large gripping power at low energy consumption. Furthermore, soft and compliant grippers based on the Fin Ray Effect are installed to result in a high adaptability to different perching objects. A prototype of this system has been successfully tested in a free-flight environment on a multirotor platform and a small flapping-wing MAV. Currently tests are performed to gather additional insights into the perching performance along with the development of further capabilities.
Related IEEE Robotics and Automation Letters (RA-L) Journal Paper
